Copyright © 2026 FAST INTERNET RETAILING (FIR) HOLDING COMPANY LIMITED TAIWAN BRANCH(HK) All Rights Reserved.
Designed By DeviseTop
Designed By DeviseTop
 AI智能坡度升降與阻力調整
AI智能坡度升降與阻力調整
在飛輪有氧模式騎行中,傳統影響強度的元素包括「騎行時間、速度、阻力」,隨著科技進步,現在還加入了「坡度」這一元素。BH RE3 AI磁控智能飛輪車具有AI智能坡度升降與自動變阻功能,坡度+8、-8的調整範圍,加上32級阻力精準調整,能夠充分模擬各種賽道環境。透過源自公路車設計的前握把快捷鍵,使用者可以輕鬆切換「阻力、坡度」控制,提升訓練效果。
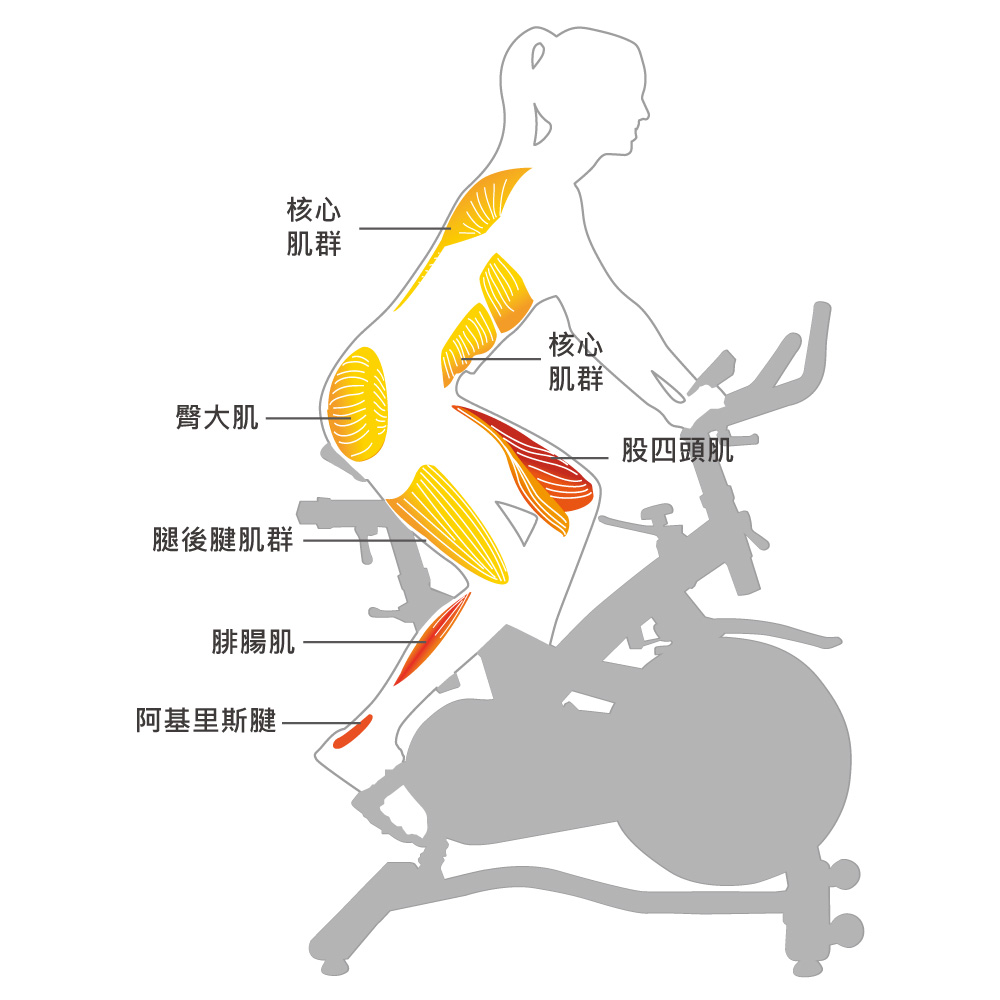
在坐姿的動作中,身體相較於站姿的動作更加穩定,因此,身體肌群運作的過程中,只要保持身體、關節的放鬆,主要參與的肌群,由上半身的核心肌群,連動至下半身前、後(股四頭肌、臀大肌及腿後腱肌群),並且產生有效率的力量輸出。而坡度對於肌群運作的影響,則是在不同的角度,肌群運用的深、淺層張力不同,因此,上坡角度(+1~+8)的騎行過程中,體感如同實際騎行於道路上的感覺,爬昇角度越大,肌群的緊張程度越大。
站姿跑步的動作,通常是在較快的踏頻使用(60 RPM~75 RPM),上半身(核心肌群)負責穩定,下半身(股四頭肌)負責快速的運作。在編排的概念中,站姿跑步通常不會有太高的阻力值,阻力值越大,需要藉由其他肌群進行協助,在力量連動的傳達上,也會影響到速度的快與慢。因此,這個動作的強度體感,通常透過呼吸的頻率(喘、不喘),便能知道強度的過與不及。
站姿爬坡的動作,通常使用於較慢的踏頻(40 RPM~60 RPM),搭配較重的阻力以及越大的爬昇角度。上半身(核心肌群)負責穩定,下半身(臀大肌、腿後腱肌群、腓腸肌)負責將力量傳達至踏板。由於搭配較重的阻力,踏頻通常較慢,在這個動作中,如果將踏頻設為(50 RPM),阻力設定為(20~32),坡度設定為(4~8),在肌群運作的同時需要大量的氧氣和血液提供動力,進而影響心跳率的高低,在這個強度設定下,心率通常會在140~160 BPM間,甚至更高。如果踏頻更快,心跳率會更高。
當我們更深入的瞭解騎行過程中所運用的主要肌群及協同肌群,不論針對公路車騎行訓練或是飛輪有氧的強度編排,都能有更充份的認知。也能針對不同的訓練需求進行動作的調整及設計。

 商用器材採購
商用器材採購